Perception, Decision, and Control¶
The following is the documentation for the modules in the Perception, Decision, and Control package.
Data Processing¶
The processing of input data in the perception part is structured as a directed acyclic graph. There may be multiple data source nodes, but only one sink node. This approach allows parallel processing of data from multiple sources. Intermediate nodes of the graph may use classes defined in this module to process the data.
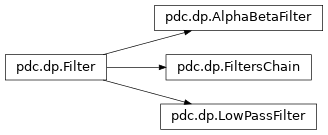
Inheritance diagram¶
Members¶
- class pdc.dp.Filter¶
Base class for the filters.
- update(curr)¶
Process curr, return processed.
- Parameters
curr – Float or dict. Measured value.
- class pdc.dp.FiltersChain(*filters)¶
Chain multiple filters that are run in sequence.
When any of the filters fails, the whole
FiltersChainfails. To avoid problems of sharing filters betweenFiltersChainclasses (it’s Python) inFiltersChainconstructor always callFilterconstructor:FiltersChain( Filter(), Filter(), Filter())
- filters¶
A list of filters to be applied.
- _update(curr)¶
Run multiple filters on curr, stop if any of the filters fails.
- class pdc.dp.LowPassFilter(weight=0.5, keys=[])¶
See https://en.wikipedia.org/wiki/Low-pass_filter
- _update(curr)¶
Compute value of curr in Low-Pass filter fashion.
- class pdc.dp.AlphaBetaFilter(a=0.85, b=0.005, x=None, v=None, dt=0.1, keys=[])¶
See https://en.wikipedia.org/wiki/Alpha_beta_filter
- _update(curr)¶
Compute value of curr in AB filter fashion.
Behavior, Query, and State¶
The decision and control part is structured as a directed, possibly
cyclic graph. The following describes Behavior, Query, and State
(BQS) classes. TL;DR: transfer between states of FSM is done by BT.
Behavior nodes correspond to control flow nodes of Behavior Tree
(BT). Query nodes correspond to condition nodes of BT. State nodes
correspond to root of BT, action nodes of BT, as well as states of
Finite State Machine (FSM). BQS differences to BT and FSM are discussed
bellow.
Behavior nodes are non-leafy nodes with the member children, which
is a list of other BQS nodes. The children nodes are processed in an
order corresponding to the behavior of the node subclass. The return
value of the decide() method is also specific to the node subclass.
Examples of Behavior nodes are Sequence, Fallback, and Not.
Query nodes are leaf nodes that query the world in read-only
fashion. The decision process cannot stop at the Query node.
Examples of Query nodes are AlwaysTrue and AlwaysFalse.
State nodes are leaf nodes where the decision process begins and ends.
Every State node is the root of BT and must have had some Behavior
node assigned to the change_state member.
Behavior and Query nodes must implement _decide() method.
State nodes are expected to implement _control() method.
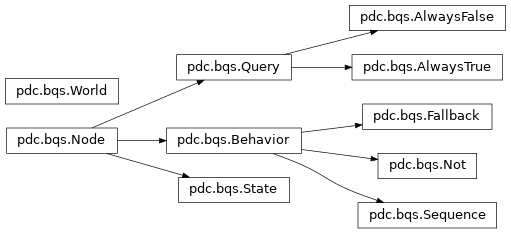
Inheritance diagram¶
Comparison to FSM¶
Compared to FSM, BQS has framework for transition between states.
change_state is the root of the BT, the destination states are
State leaves of that BT.
Comparison to BT¶
BQS can simulate BT when only one behavior is specified and assigned to
change_state member of every State.
Each call to decide() always returns some object or False. The
running state known from BT is not possible because BT is only used to
change between (FSM) states. (To change between BT actions.)
World¶
Each BQS node has world member. World is shared between BQS nodes
and contain the perceived information, the history, and the status (of
the world).
It is possible to define multiple worlds and then assign different BQS
nodes to different worlds. To share information between worlds, the
State nodes of the first world can implement method that updates the
second world, i.e., the _control(world) method.
Members¶
- class pdc.bqs.World(history_len=2)¶
History and status of the world.
- cw(element=None)¶
Return (element of) current (last update of) world.
- include(*nodes)¶
Include BQS nodes into the self (world).
- Parameters
nodes – Subclasses of BQS
Node.
- _increase_write_world_index()¶
Begin addition of new world. Must be atomic.
- append_blank_world()¶
Add new blank world into the history. Must be atomic.
- append_copied_world()¶
Add copy of the last world into the history. Must be atomic.
- append_new_world(**kwargs)¶
Add new world from keywords. Must be atomic.
- world_added()¶
New world has been added, mark for read. Must be atomic.
- class pdc.bqs.Node¶
Base node of BQS graph.
- _decide()¶
Abstract. To be implemented by Decision subclasses.
- control(*args, **kwargs)¶
Run a controller. Calls
_control().
- _control()¶
Abstract. To be implemented by Control subclasses.
- world = <pdc.bqs.World object>¶
Shared history of the world.
- class pdc.bqs.Behavior(*children)¶
Non-leaf decision node of BQS graph.
No query to
world. Just tick children.Subclasses must implement
_decide()method.
- class pdc.bqs.Query¶
Read-only query to
world.Leaf node of BQS, but can’t end deciding here.
Subclasses must implement
_decide()method.
- class pdc.bqs.State¶
Leaf node where decision process begins and ends.
Read-only query to
world.Subclasses must have a
Behaviorassigned tochange_statemember.Subclasses must implement
_control()method.- set_begin()¶
Set self as the beginning state.
- class pdc.bqs.Sequence(*children)¶
-> in BT.
- _decide()¶
Return the last child’s return if all children succeed or False.
- class pdc.bqs.Fallback(*children)¶
? in BT.
- _decide()¶
Return the first successfull child’s return or
False.